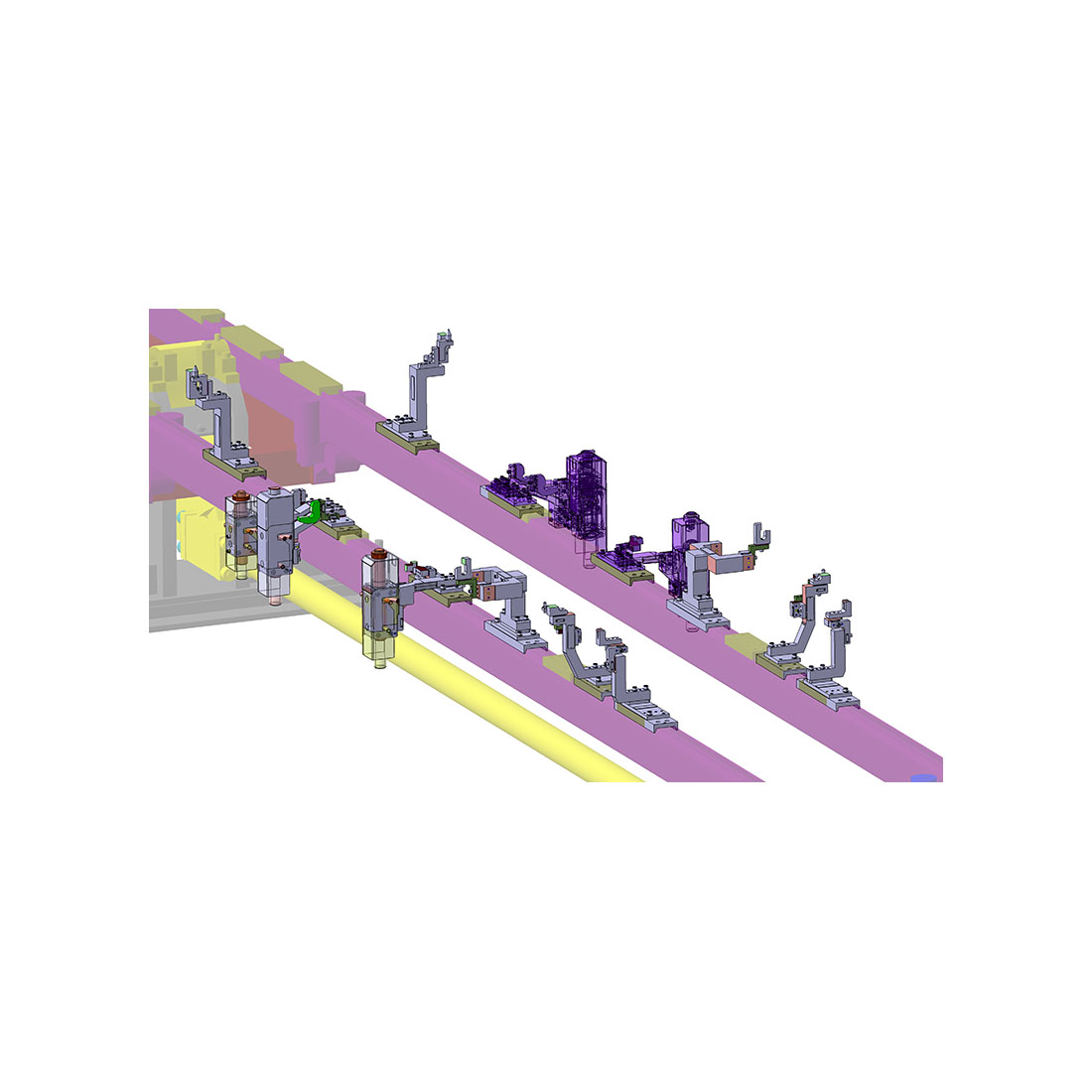
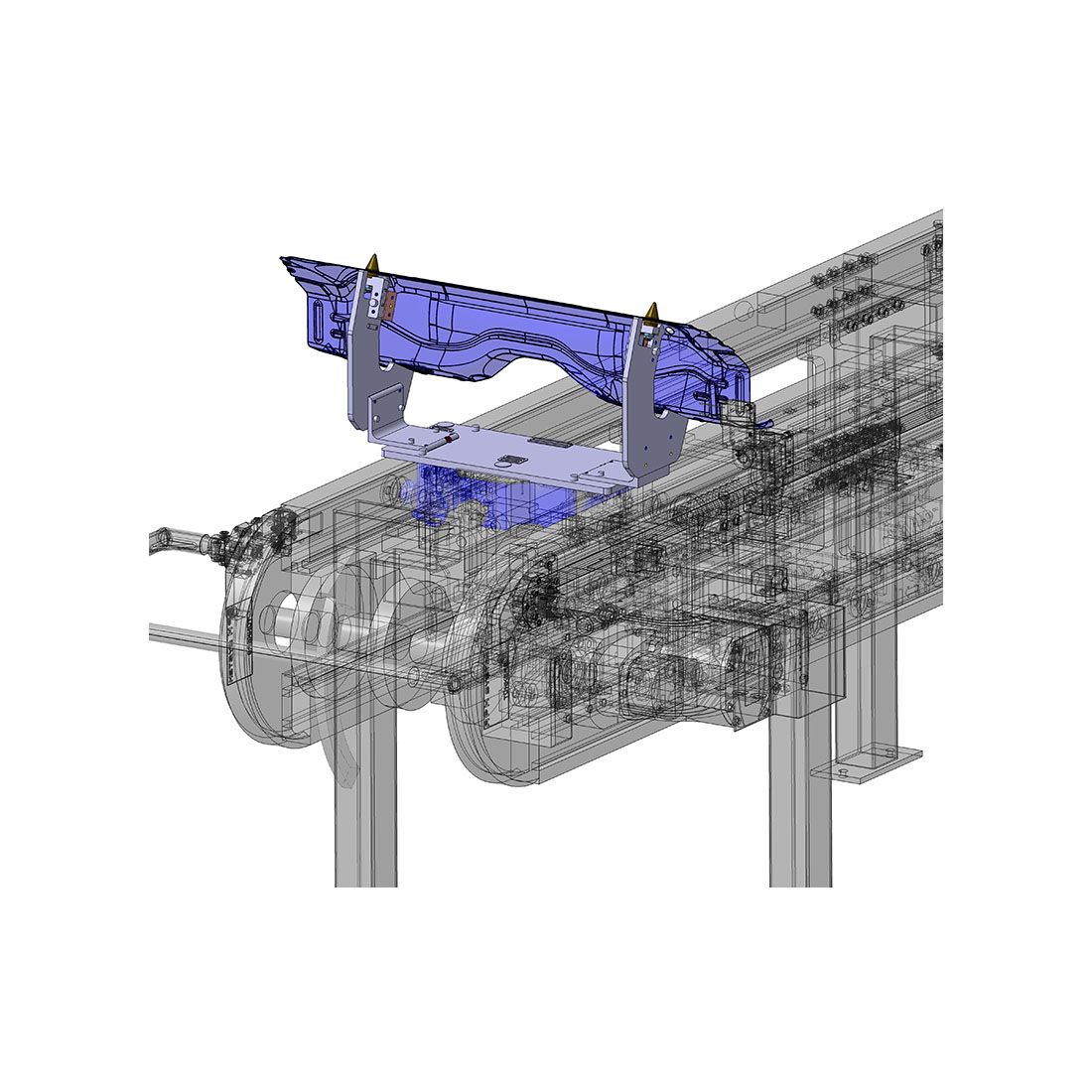
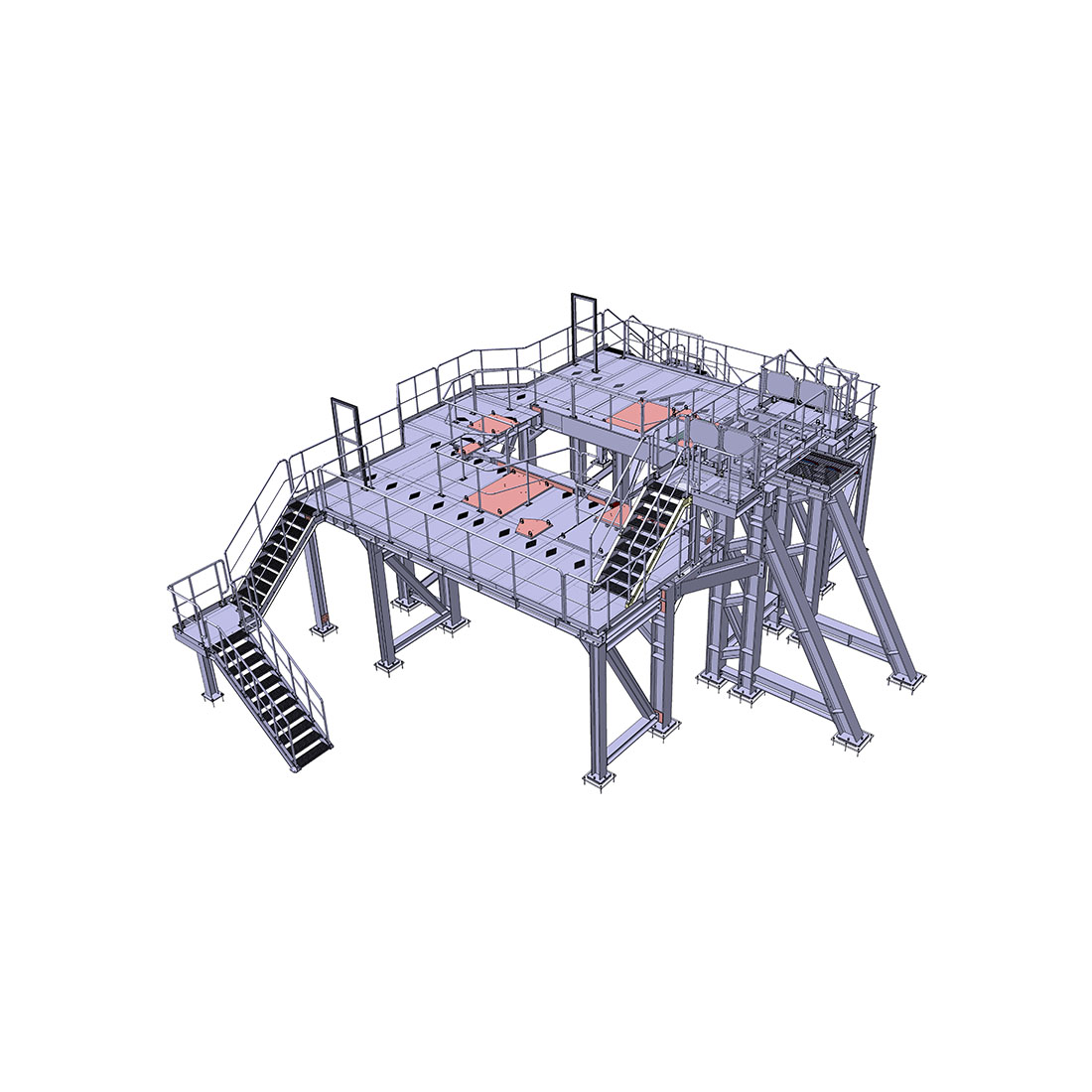
Roboter Simulation
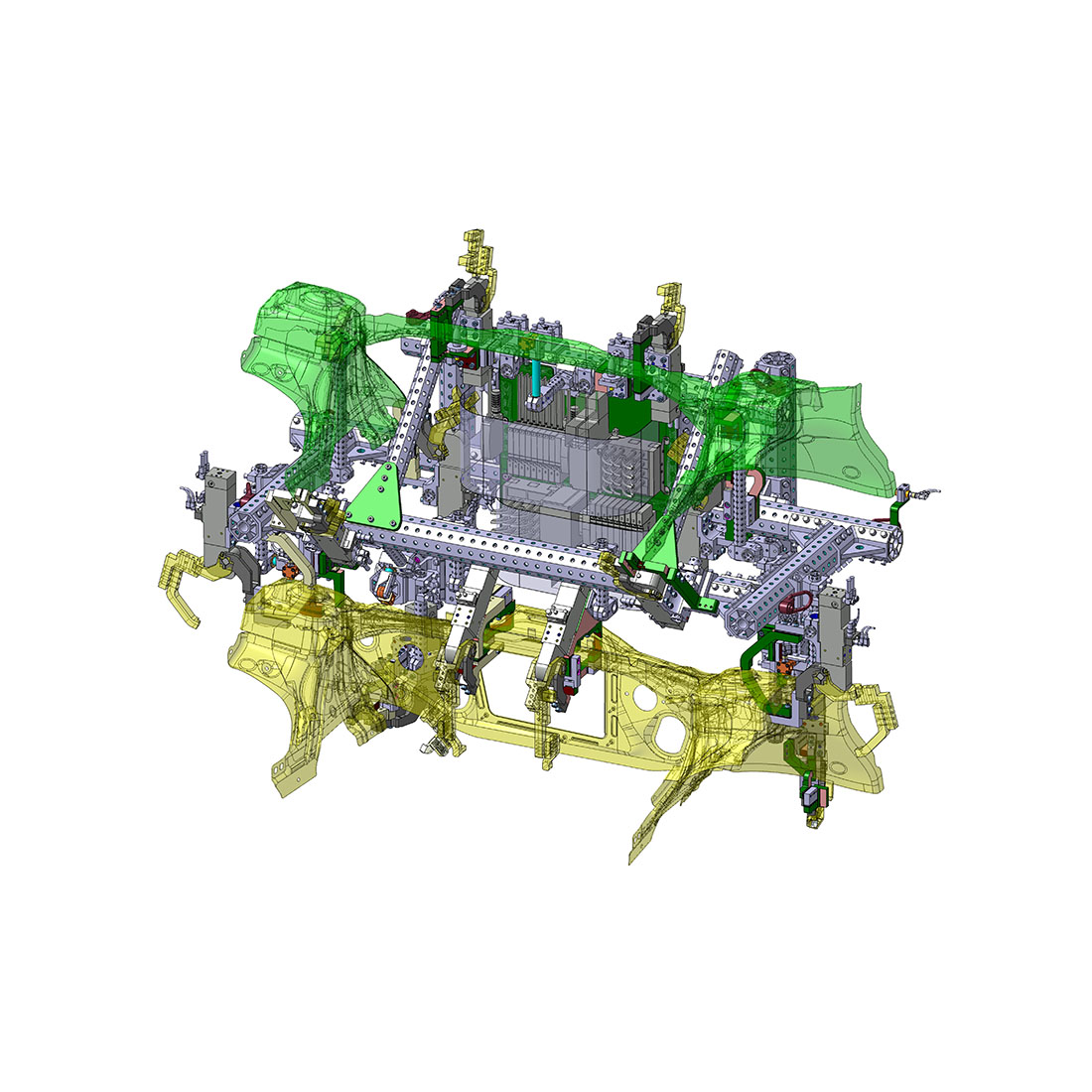
Realisation einer Simulationsumgebung, Überprüfung der Kollisionsfreiheit der Vorrichtungen, Erstellung der Umleitungen, Signalen, Blockierungen, Befehlen und Kommentaren mithilfe von RCS-Modulen, die reale Bewegungen und Zeiten sicherstellen. Wir programmieren KUKA-, FANUC- und ABB-Roboter.
Wir haben Erfahrungen mit diesen Verbindungstechnologien – Punktschweißen, MIG/MAG Schweißen, Laserschweißen, Kleben, Schraubenschweißen, Mutternschweißen, Kugelschweißen, Nieten, Schrauben, Clinchen, Klipsen, Reibschweißen (REB), Klebestoffwischen, Bürsten, Laserreinigung und Rollfalzen (3 Arten von Technologie).

 Čeština
Čeština